Transfer Function Stability - Interesting Facts about Polynomial Form
Introduction
Transfer function stability is solely determined by its denominator. The roots of a denominator are called poles.
Poles located in the left half-plane are stable while poles located in the right half-plane are not stable.
The reasoning is very simple: the Laplace operator "s", which is location in the Laplace domain, can be also written as:

Left half-plane has negative sigma.
For a first-order system, the following transfer function corresponds to this time domain differential equation:

Consider a step change as the input:

Hence:

The output converges to 0.2, a steady-state and stable value.
Stability of a Generic Polynomial
Generally, consider the following generic denominator:

If such a polynomial is expanded and terms are collected, we obtain:

Claim: If all polynomial coefficients are positive, all roots are negative and the system is stable
In short:
- If all polynomial coefficients are positive, then all poles are negative.
- If all roots are negative, then all polynomial coefficients are positive.
If all three terms a, b, and c are positive, then all three poles are located in the left-half plane and the system is stable. Also, notice that all coefficient of the expanded polynomial are positive.
E.g., a = 7, b = 2, c = 4, (poles are located at -7, -2, and -4).

For a polynomial containing complex poles as shown below, the imaginary part sign does not matter since there needs to be the complex pole counterpart.

Thus, it suffices that a and b are positive:

How do we know that the second polynomial (s2+2bs+b2+c2) has negative roots?
The b2 and c2 terms are always positive and the b term is positive as indicated above.
Therefore, if all coefficients are positive, all roots are negative and the system is stable.
Claim: If any polynomial coefficient is negative, at least one root is positive and the system is unstable
Without a proof here.
Claim: If a polynomial coefficient is zero, at least one root is positive and the system is unstable
See the following polynomial:

Case 1: s2(a+b+c) = 0
This means that at least one term (from a, b, c) is negative, otherwise the sum would be positive.
Case 2: s(ab+bc+ca) = 0
From the way the coefficient is structured, at least one term has to be negative or all three terms need to be zero otherwise the coefficient would be positive.
Case 3: abc = 0
This term can be zero. This also means that at least one root is zero as well.
e.g. a = 0

Major takeaway: based on this analysis (by no means a complete proof) when a coefficient of a power of s is zero, then the system is unstable.
Consider the following system. For which gain Kp does the closed-loop system becomes stable?

The plant transfer function G(s) is shown below:

The complete closed-loop transfer function, including the proportional controller Kp, is:

Answer: No proportional controller gain can make the system stable since the closed-loop transfer function has zero "s" and "s2" term coefficients. All coefficients of "sn" must be positive.
Root locus follows (notice the two right half-plane poles).

Further Reading
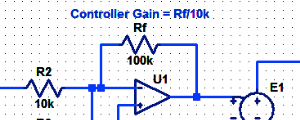
Proportional Controller Implementation
In MatLab, DSPs, and FPGAs.
.
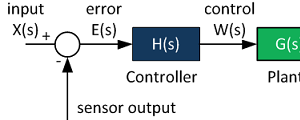
Control System Block Diagram
The fundamentals of signal flow.
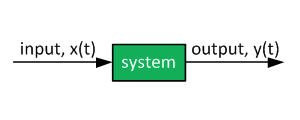
System Modeling With Transfer Functions
Introduction to dynamic systems.

Fourier Series Demo
It is all sine waves.