Control Systems made easy
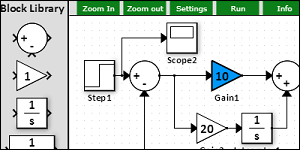
Web-based Simulator
Explore, model, simulate, and analyze dynamic control systems in our simulator.
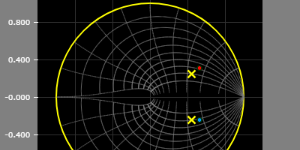
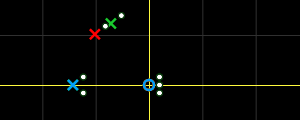
S/Z Plane Relationship
See the effect of pole location in continuous and discrete time domains at the same time.
About Control Systems Academy
Basic Info
This portal provides a number of interactive examples focused on control system theory. Crafted by researchers focused on controls of electromechanical systems, the intent is to help students and engineers "connect the dots" by showing the relationships between the frequency and time domains and to elucidate some of the more abstract control theory analysis and design concepts.
What is here?
1) A series of articles focused on control system theory are to be found here.
2) A web-based simulator suited to test out concepts right away without MatLab/Simulink installed on your machine.
3) Bode Plot Engine, a computing and plotting environment with combined symbolic and numerical inputs.
4) Many other articles focused on power electronics, motor control, and instrumentation.
This site is viewed complementary to other websites focused on control theory- because those do not have interactive elements deemed crucial to understanding the nuances of analysis and design techniques.
MatLab(©) Compatibility
Crucial interactive demos are complemented by MatLab(©) code examples that allow the reader to readily port script to a standalone MatLab(©) application. All examples were extensively tested for 1:1 match with MatLab.
Video Introduction
The following YouTube video highlights some of the interactive features found on this portal.
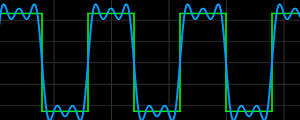
Fourier Series Demo
It is all sine waves.
System Dynamics - Time Constants
Introduction to dynamic systems.
Time Domain Scope Features
Learn to use the online interactive scope.
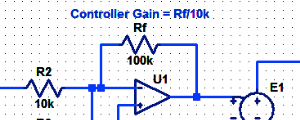
Proportional Controller Implementation
In MatLab, DSPs, and FPGAs.
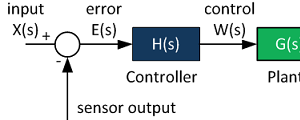
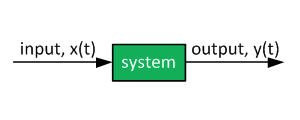
Control System Block Diagram
The fundamentals of signal flow.
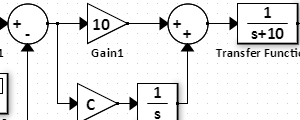
System Modeling With Transfer Functions
Introduction to dynamic systems.
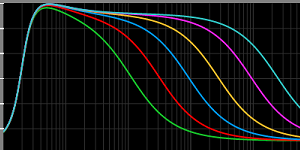
Bode Plot - Interactive Pole/Zero Placement
Bode plots of low/high-pass filters, PI controller, lead/lag filters and build-your-own.
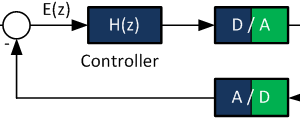
Digital Control Loops
Learn about the path from the analog domain to the discrete-time domain.
Proportional-Integral Controller: Demo
The ubiquitous PI Controller explained.
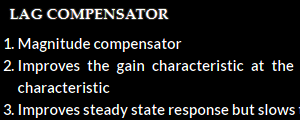
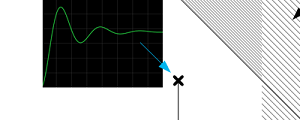
Lead / Lag Compensators
Introduction to Lead and Lag compensators. Bode plot characteristics and simulation.
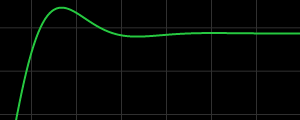
2nd-order System Dynamics
Natural frequency, damping factor, pole locations, time-domain waveforms.

Feedback-path Filtering
What is the effect of feedback-path filtering on controller design?
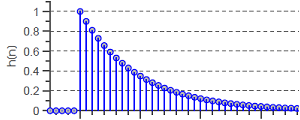
IIR to FIR System Conversion
How can one approximate IIR systems with FIR systems?

Low-Pass Filter Discretization
Explore the discretization process of the most common IIR filter.
Final Value Theorem
Calculate the final output of any transfer function. Really any transfer function?

Switching Losses & Simple 3D Plotting
Not all switches are made equal.
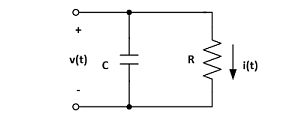
Capacitor / Resistor Discharge Circuit
Let's discharge caps with resistors. Demo included.
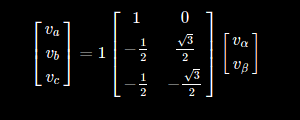
Transformations for Motor Drives - Clarke
Learn about the three-phase to two-phase transformation.
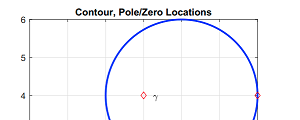
Notes on the Nyquist Stability Criterion
Notes on the Nyquist Stability Criterion by Prof. David Torrey.
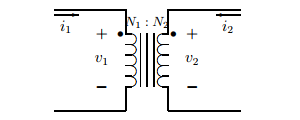
Supplementary Notes on Circuit Analysis, Pt. 1
This article by Prof. David Torrey focuses on fundamental components.
Supplementary Notes on Circuit Analysis, Pt. 2
This article by Prof. David Torrey focuses on analysis techniques.

Recent Updates:
05/27/24
Notice: This website is no longer periodically updated due to a variety of professional and personal responsibilities. However, should you find an error, please leave feedback at my email address (CSA Team. Thank you!
04/30/19
First-Order Low-Pass Filter Discretization corrections
04/13/19
Web-Based Simulator now contains pulse generation block.
02/20/19
Supplementary Notes on Circuit Analysis, Pt. 2 by Prof. David Torrey
02/10/19
Supplementary Notes on Circuit Analysis, Pt. 1 by Prof. David Torrey
01/24/19
Notes on the Nyquist Stability Criterion by Prof. David Torrey
08/15/18
Transformations for Motor Drive Design - Clarke
08/05/18
Web-based Simulator: the number of available scope signals has been increased to 5. Sine block now supports phase offset.
07/15/18
Bode Plot Engine - it is now possible to numerically evaluate symbolic variables.
06/10/18
Switching Losses & Simple 3-Dimensional Plotting plotting bugs fixed.
06/03/18
Bode Plot Engine - it is now possible to download magnitude and phase plots as .png files.
05/21/18
The www.controlsystemsacademy.org domain is now linked to this portal.
05/06/18
Bode Plot Engine - it is now possible to download frequency domain data as a .csv file.
04/22/18
Web-based Simulator: each scope block can now have a custom name.
04/20/18
Capacitor / Resistor Discharge Circuit : Theory + Demo
04/15/18
Bode Plot Engine - scripts can now be shared via page URL
04/10/18
Switching Losses & Simple 3-Dimensional Plotting
04/01/18
The integration block in Web-Based Simulator now supports initial condition.
03/20/18
Added a video introduction to some of the interactive features.
02/27/18
Fixed Documentation links on the Web-Based Simulator page.
02/04/18
Final Value Theorem
01/29/18
Bode Plot Engine - scientific notation enabled.
01/09/18
Bode Plot Engine
01/08/18
Bode Plot Engine Documentation
01/07/18
Web-based Simulator Documentation
01/05/18
IIR to FIR System Conversion
12/18/17
Feedback-path Filtering
11/21/17
2nd-order System Dynamics
11/19/17
Web-based Simulator now detects algebraic loops.
11/06/17
Lead / Lag Compensators : Introduction, Characteristics, Simulation
10/30/17
Interactive Pole-Zero Placement w/ Filter and Controller Examples and Bode Plots
10/18/17
Proportional-Integral (PI) Controller : Theory + Demo
10/09/17
Digital Control Loops
10/05/17
Time Domain Scope Feature
10/02/17
Proportional Controller: Theory and Demo
10/01/17
System Dynamics - Time Constants
09/28/17
Web-based Simulator
08/16/17
Textbooks and Journals for Power Electronics and Motor Controls
07/25/17
Control System Block Diagram
07/24/17
Transfer Function Stability - Interesting Facts About Polynomial Form
07/23/17
System Modeling With Transfer Functions
07/20/17
Proportional Controller Implementation
07/10/17
Relationship Between S/Z Planes and Time Domain
06/30/17
Interactive Fourier Series Demo